


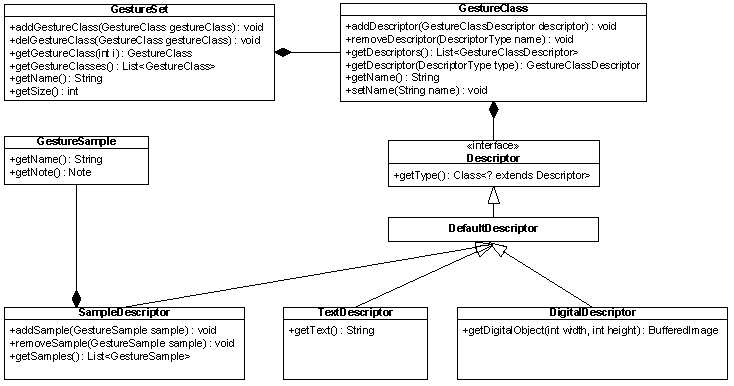
The representation of gestures in the framework is an important design decision and has implications on all other parts. It was a requirement for the data structures to manage gestures and groups of gestures. Furthermore, different algorithms need different descriptions of a gesture. Therefore, it is important that the model classes do not make any assumptions about specific algorithms or provide algorithm-specific data. Figure 2 shows the UML diagram of our data structure for representing gestures.
GestureClass
The
GestureClass
class represents an abstract gesture and therefore
holds the name of the class and a list of
descriptors characterising it. For example to gather
circles as gestures, we instantiate a new
GestureClass
and set the name to 'Circle'. The class
itself does not hold any information on how the
gesture looks like and needs at least one descriptor
characterising the circle as a graphical object.
GestureSet
The class
GestureSet
contains a collection of gesture classes. This
aggregation is necessary to be able to initialise an
algorithm with a specific set of gestures whereas a
gesture class can be a member of different gesture
sets.
Descriptor
Descriptor
is an interface that all gesture class descriptors
have to implement. It does not specify any methods
concerning the retrieval of gesture descriptions and
is therefore more a marker than a functional
interface. The idea behind this is that we do not
want to limit the functionality of descriptors and
it is not possible to provide methods for arbitrary
descriptors which cannot be specified in advance.
Each implementation of an algorithm is responsible
for the necessary type checks and casts to work with
the desired descriptor. Therefore, algorithms have
to know on which descriptors they can operate and
have to check if the necessary descriptors are
available for all classes in the gesture set.
SampleDescriptor
The
SampleDescriptor
class implements the
Descriptor
interface and describes gestures by samples whereas
a sample is a instance of a gesture. This descriptor
is used for training-based algorithms.
GestureSample
The
GestureSample
class is the instance of a gesture. In our case, it
contains the time stamped locations gathered from
the input device summarised as a
Note
. Despite the stroke detection the data gathered
from the input device is not modified. This allows
the algorithms to work on the original data and
delegates the preprocessing to them.
TextDescriptor
The
TextDescriptor
class implements the
Descriptor
interface and specifies a gesture in terms of text.
This could for example be a character string which
describes the directions between characteristic
points of the gesture.
DigitalDescriptor
DigitalDescriptor
is an abstract class describing the gesture as
digital image. This descriptor is not suitable for
the recognition but rather for the digital
representation and can provide a digital image of
the gesture. Therefore, our gesture representation
is powerful enough to build design oriented
applications. For example, we can draw a circle that
is recognised with the help of another descriptor
and the application can then present its digital
version based on the digital descriptor.